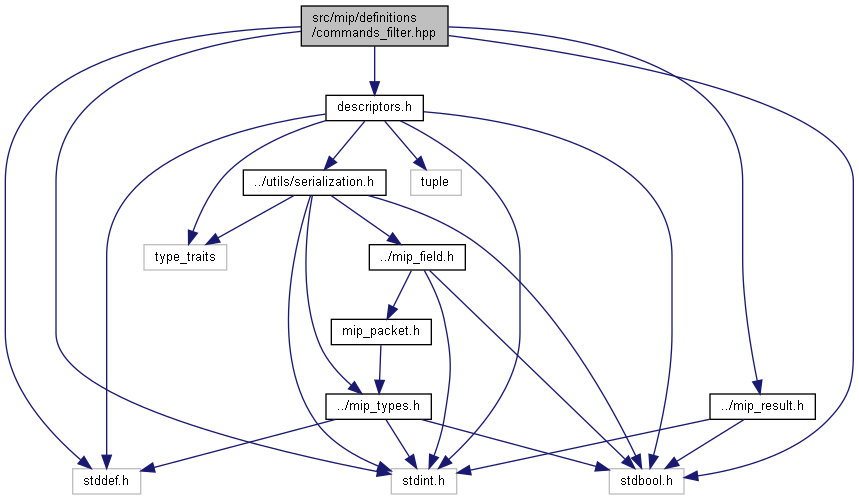
#include "descriptors.h"#include "../mip_result.h"#include <stdint.h>#include <stddef.h>#include <stdbool.h>
Include dependency graph for commands_filter.hpp:
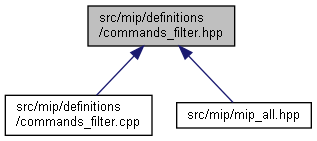
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mip | |
| A collection of C++ classes and functions covering the full mip api. | |
| mip::C | |
| mip::commands_filter | |
Functions | |
| void | mip::commands_filter::insert (Serializer &serializer, const Reset &self) |
| void | mip::commands_filter::extract (Serializer &serializer, Reset &self) |
| CmdResult | mip::commands_filter::reset (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const SetInitialAttitude &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SetInitialAttitude &self) |
| CmdResult | mip::commands_filter::setInitialAttitude (C::mip_interface &device, float roll, float pitch, float heading) |
| void | mip::commands_filter::insert (Serializer &serializer, const EstimationControl &self) |
| void | mip::commands_filter::extract (Serializer &serializer, EstimationControl &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const EstimationControl::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, EstimationControl::Response &self) |
| CmdResult | mip::commands_filter::writeEstimationControl (C::mip_interface &device, EstimationControl::EnableFlags enable) |
| CmdResult | mip::commands_filter::readEstimationControl (C::mip_interface &device, EstimationControl::EnableFlags *enableOut) |
| CmdResult | mip::commands_filter::saveEstimationControl (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadEstimationControl (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultEstimationControl (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const ExternalGnssUpdate &self) |
| void | mip::commands_filter::extract (Serializer &serializer, ExternalGnssUpdate &self) |
| CmdResult | mip::commands_filter::externalGnssUpdate (C::mip_interface &device, double gpsTime, uint16_t gpsWeek, double latitude, double longitude, double height, const float *velocity, const float *posUncertainty, const float *velUncertainty) |
| void | mip::commands_filter::insert (Serializer &serializer, const ExternalHeadingUpdate &self) |
| void | mip::commands_filter::extract (Serializer &serializer, ExternalHeadingUpdate &self) |
| CmdResult | mip::commands_filter::externalHeadingUpdate (C::mip_interface &device, float heading, float headingUncertainty, uint8_t type) |
| void | mip::commands_filter::insert (Serializer &serializer, const ExternalHeadingUpdateWithTime &self) |
| void | mip::commands_filter::extract (Serializer &serializer, ExternalHeadingUpdateWithTime &self) |
| CmdResult | mip::commands_filter::externalHeadingUpdateWithTime (C::mip_interface &device, double gpsTime, uint16_t gpsWeek, float heading, float headingUncertainty, uint8_t type) |
| void | mip::commands_filter::insert (Serializer &serializer, const TareOrientation &self) |
| void | mip::commands_filter::extract (Serializer &serializer, TareOrientation &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const TareOrientation::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, TareOrientation::Response &self) |
| CmdResult | mip::commands_filter::writeTareOrientation (C::mip_interface &device, TareOrientation::MipTareAxes axes) |
| CmdResult | mip::commands_filter::readTareOrientation (C::mip_interface &device, TareOrientation::MipTareAxes *axesOut) |
| CmdResult | mip::commands_filter::saveTareOrientation (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadTareOrientation (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultTareOrientation (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const SensorToVehicleRotationEuler &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SensorToVehicleRotationEuler &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const SensorToVehicleRotationEuler::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SensorToVehicleRotationEuler::Response &self) |
| CmdResult | mip::commands_filter::writeSensorToVehicleRotationEuler (C::mip_interface &device, float roll, float pitch, float yaw) |
| CmdResult | mip::commands_filter::readSensorToVehicleRotationEuler (C::mip_interface &device, float *rollOut, float *pitchOut, float *yawOut) |
| CmdResult | mip::commands_filter::saveSensorToVehicleRotationEuler (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadSensorToVehicleRotationEuler (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultSensorToVehicleRotationEuler (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const SensorToVehicleRotationDcm &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SensorToVehicleRotationDcm &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const SensorToVehicleRotationDcm::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SensorToVehicleRotationDcm::Response &self) |
| CmdResult | mip::commands_filter::writeSensorToVehicleRotationDcm (C::mip_interface &device, const float *dcm) |
| CmdResult | mip::commands_filter::readSensorToVehicleRotationDcm (C::mip_interface &device, float *dcmOut) |
| CmdResult | mip::commands_filter::saveSensorToVehicleRotationDcm (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadSensorToVehicleRotationDcm (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultSensorToVehicleRotationDcm (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const SensorToVehicleRotationQuaternion &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SensorToVehicleRotationQuaternion &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const SensorToVehicleRotationQuaternion::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SensorToVehicleRotationQuaternion::Response &self) |
| CmdResult | mip::commands_filter::writeSensorToVehicleRotationQuaternion (C::mip_interface &device, const float *quat) |
| CmdResult | mip::commands_filter::readSensorToVehicleRotationQuaternion (C::mip_interface &device, float *quatOut) |
| CmdResult | mip::commands_filter::saveSensorToVehicleRotationQuaternion (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadSensorToVehicleRotationQuaternion (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultSensorToVehicleRotationQuaternion (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const SensorToVehicleOffset &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SensorToVehicleOffset &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const SensorToVehicleOffset::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SensorToVehicleOffset::Response &self) |
| CmdResult | mip::commands_filter::writeSensorToVehicleOffset (C::mip_interface &device, const float *offset) |
| CmdResult | mip::commands_filter::readSensorToVehicleOffset (C::mip_interface &device, float *offsetOut) |
| CmdResult | mip::commands_filter::saveSensorToVehicleOffset (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadSensorToVehicleOffset (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultSensorToVehicleOffset (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const AntennaOffset &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AntennaOffset &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const AntennaOffset::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AntennaOffset::Response &self) |
| CmdResult | mip::commands_filter::writeAntennaOffset (C::mip_interface &device, const float *offset) |
| CmdResult | mip::commands_filter::readAntennaOffset (C::mip_interface &device, float *offsetOut) |
| CmdResult | mip::commands_filter::saveAntennaOffset (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadAntennaOffset (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultAntennaOffset (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const GnssSource &self) |
| void | mip::commands_filter::extract (Serializer &serializer, GnssSource &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const GnssSource::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, GnssSource::Response &self) |
| CmdResult | mip::commands_filter::writeGnssSource (C::mip_interface &device, GnssSource::Source source) |
| CmdResult | mip::commands_filter::readGnssSource (C::mip_interface &device, GnssSource::Source *sourceOut) |
| CmdResult | mip::commands_filter::saveGnssSource (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadGnssSource (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultGnssSource (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const HeadingSource &self) |
| void | mip::commands_filter::extract (Serializer &serializer, HeadingSource &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const HeadingSource::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, HeadingSource::Response &self) |
| CmdResult | mip::commands_filter::writeHeadingSource (C::mip_interface &device, HeadingSource::Source source) |
| CmdResult | mip::commands_filter::readHeadingSource (C::mip_interface &device, HeadingSource::Source *sourceOut) |
| CmdResult | mip::commands_filter::saveHeadingSource (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadHeadingSource (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultHeadingSource (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const AutoInitControl &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AutoInitControl &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const AutoInitControl::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AutoInitControl::Response &self) |
| CmdResult | mip::commands_filter::writeAutoInitControl (C::mip_interface &device, uint8_t enable) |
| CmdResult | mip::commands_filter::readAutoInitControl (C::mip_interface &device, uint8_t *enableOut) |
| CmdResult | mip::commands_filter::saveAutoInitControl (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadAutoInitControl (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultAutoInitControl (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const AltitudeAiding &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AltitudeAiding &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const AltitudeAiding::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AltitudeAiding::Response &self) |
| CmdResult | mip::commands_filter::writeAltitudeAiding (C::mip_interface &device, uint8_t aidingSelector) |
| CmdResult | mip::commands_filter::readAltitudeAiding (C::mip_interface &device, uint8_t *aidingSelectorOut) |
| CmdResult | mip::commands_filter::saveAltitudeAiding (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadAltitudeAiding (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultAltitudeAiding (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const AutoZupt &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AutoZupt &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const AutoZupt::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AutoZupt::Response &self) |
| CmdResult | mip::commands_filter::writeAutoZupt (C::mip_interface &device, uint8_t enable, float threshold) |
| CmdResult | mip::commands_filter::readAutoZupt (C::mip_interface &device, uint8_t *enableOut, float *thresholdOut) |
| CmdResult | mip::commands_filter::saveAutoZupt (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadAutoZupt (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultAutoZupt (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const AutoAngularZupt &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AutoAngularZupt &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const AutoAngularZupt::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AutoAngularZupt::Response &self) |
| CmdResult | mip::commands_filter::writeAutoAngularZupt (C::mip_interface &device, uint8_t enable, float threshold) |
| CmdResult | mip::commands_filter::readAutoAngularZupt (C::mip_interface &device, uint8_t *enableOut, float *thresholdOut) |
| CmdResult | mip::commands_filter::saveAutoAngularZupt (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadAutoAngularZupt (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultAutoAngularZupt (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const CommandedZupt &self) |
| void | mip::commands_filter::extract (Serializer &serializer, CommandedZupt &self) |
| CmdResult | mip::commands_filter::commandedZupt (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const CommandedAngularZupt &self) |
| void | mip::commands_filter::extract (Serializer &serializer, CommandedAngularZupt &self) |
| CmdResult | mip::commands_filter::commandedAngularZupt (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const AidingMeasurementEnable &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AidingMeasurementEnable &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const AidingMeasurementEnable::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AidingMeasurementEnable::Response &self) |
| CmdResult | mip::commands_filter::writeAidingMeasurementEnable (C::mip_interface &device, AidingMeasurementEnable::AidingSource aidingSource, bool enable) |
| CmdResult | mip::commands_filter::readAidingMeasurementEnable (C::mip_interface &device, AidingMeasurementEnable::AidingSource aidingSource, bool *enableOut) |
| CmdResult | mip::commands_filter::saveAidingMeasurementEnable (C::mip_interface &device, AidingMeasurementEnable::AidingSource aidingSource) |
| CmdResult | mip::commands_filter::loadAidingMeasurementEnable (C::mip_interface &device, AidingMeasurementEnable::AidingSource aidingSource) |
| CmdResult | mip::commands_filter::defaultAidingMeasurementEnable (C::mip_interface &device, AidingMeasurementEnable::AidingSource aidingSource) |
| void | mip::commands_filter::insert (Serializer &serializer, const Run &self) |
| void | mip::commands_filter::extract (Serializer &serializer, Run &self) |
| CmdResult | mip::commands_filter::run (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const KinematicConstraint &self) |
| void | mip::commands_filter::extract (Serializer &serializer, KinematicConstraint &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const KinematicConstraint::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, KinematicConstraint::Response &self) |
| CmdResult | mip::commands_filter::writeKinematicConstraint (C::mip_interface &device, uint8_t accelerationConstraintSelection, uint8_t velocityConstraintSelection, uint8_t angularConstraintSelection) |
| CmdResult | mip::commands_filter::readKinematicConstraint (C::mip_interface &device, uint8_t *accelerationConstraintSelectionOut, uint8_t *velocityConstraintSelectionOut, uint8_t *angularConstraintSelectionOut) |
| CmdResult | mip::commands_filter::saveKinematicConstraint (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadKinematicConstraint (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultKinematicConstraint (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const InitializationConfiguration &self) |
| void | mip::commands_filter::extract (Serializer &serializer, InitializationConfiguration &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const InitializationConfiguration::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, InitializationConfiguration::Response &self) |
| CmdResult | mip::commands_filter::writeInitializationConfiguration (C::mip_interface &device, uint8_t waitForRunCommand, InitializationConfiguration::InitialConditionSource initialCondSrc, InitializationConfiguration::AlignmentSelector autoHeadingAlignmentSelector, float initialHeading, float initialPitch, float initialRoll, const float *initialPosition, const float *initialVelocity, FilterReferenceFrame referenceFrameSelector) |
| CmdResult | mip::commands_filter::readInitializationConfiguration (C::mip_interface &device, uint8_t *waitForRunCommandOut, InitializationConfiguration::InitialConditionSource *initialCondSrcOut, InitializationConfiguration::AlignmentSelector *autoHeadingAlignmentSelectorOut, float *initialHeadingOut, float *initialPitchOut, float *initialRollOut, float *initialPositionOut, float *initialVelocityOut, FilterReferenceFrame *referenceFrameSelectorOut) |
| CmdResult | mip::commands_filter::saveInitializationConfiguration (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadInitializationConfiguration (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultInitializationConfiguration (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const AdaptiveFilterOptions &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AdaptiveFilterOptions &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const AdaptiveFilterOptions::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, AdaptiveFilterOptions::Response &self) |
| CmdResult | mip::commands_filter::writeAdaptiveFilterOptions (C::mip_interface &device, uint8_t level, uint16_t timeLimit) |
| CmdResult | mip::commands_filter::readAdaptiveFilterOptions (C::mip_interface &device, uint8_t *levelOut, uint16_t *timeLimitOut) |
| CmdResult | mip::commands_filter::saveAdaptiveFilterOptions (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadAdaptiveFilterOptions (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultAdaptiveFilterOptions (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const MultiAntennaOffset &self) |
| void | mip::commands_filter::extract (Serializer &serializer, MultiAntennaOffset &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const MultiAntennaOffset::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, MultiAntennaOffset::Response &self) |
| CmdResult | mip::commands_filter::writeMultiAntennaOffset (C::mip_interface &device, uint8_t receiverId, const float *antennaOffset) |
| CmdResult | mip::commands_filter::readMultiAntennaOffset (C::mip_interface &device, uint8_t receiverId, float *antennaOffsetOut) |
| CmdResult | mip::commands_filter::saveMultiAntennaOffset (C::mip_interface &device, uint8_t receiverId) |
| CmdResult | mip::commands_filter::loadMultiAntennaOffset (C::mip_interface &device, uint8_t receiverId) |
| CmdResult | mip::commands_filter::defaultMultiAntennaOffset (C::mip_interface &device, uint8_t receiverId) |
| void | mip::commands_filter::insert (Serializer &serializer, const RelPosConfiguration &self) |
| void | mip::commands_filter::extract (Serializer &serializer, RelPosConfiguration &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const RelPosConfiguration::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, RelPosConfiguration::Response &self) |
| CmdResult | mip::commands_filter::writeRelPosConfiguration (C::mip_interface &device, uint8_t source, FilterReferenceFrame referenceFrameSelector, const double *referenceCoordinates) |
| CmdResult | mip::commands_filter::readRelPosConfiguration (C::mip_interface &device, uint8_t *sourceOut, FilterReferenceFrame *referenceFrameSelectorOut, double *referenceCoordinatesOut) |
| CmdResult | mip::commands_filter::saveRelPosConfiguration (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadRelPosConfiguration (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultRelPosConfiguration (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const RefPointLeverArm &self) |
| void | mip::commands_filter::extract (Serializer &serializer, RefPointLeverArm &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const RefPointLeverArm::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, RefPointLeverArm::Response &self) |
| CmdResult | mip::commands_filter::writeRefPointLeverArm (C::mip_interface &device, RefPointLeverArm::ReferencePointSelector refPointSel, const float *leverArmOffset) |
| CmdResult | mip::commands_filter::readRefPointLeverArm (C::mip_interface &device, RefPointLeverArm::ReferencePointSelector *refPointSelOut, float *leverArmOffsetOut) |
| CmdResult | mip::commands_filter::saveRefPointLeverArm (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadRefPointLeverArm (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultRefPointLeverArm (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const SpeedMeasurement &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SpeedMeasurement &self) |
| CmdResult | mip::commands_filter::speedMeasurement (C::mip_interface &device, uint8_t source, float timeOfWeek, float speed, float speedUncertainty) |
| void | mip::commands_filter::insert (Serializer &serializer, const SpeedLeverArm &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SpeedLeverArm &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const SpeedLeverArm::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SpeedLeverArm::Response &self) |
| CmdResult | mip::commands_filter::writeSpeedLeverArm (C::mip_interface &device, uint8_t source, const float *leverArmOffset) |
| CmdResult | mip::commands_filter::readSpeedLeverArm (C::mip_interface &device, uint8_t source, float *leverArmOffsetOut) |
| CmdResult | mip::commands_filter::saveSpeedLeverArm (C::mip_interface &device, uint8_t source) |
| CmdResult | mip::commands_filter::loadSpeedLeverArm (C::mip_interface &device, uint8_t source) |
| CmdResult | mip::commands_filter::defaultSpeedLeverArm (C::mip_interface &device, uint8_t source) |
| void | mip::commands_filter::insert (Serializer &serializer, const WheeledVehicleConstraintControl &self) |
| void | mip::commands_filter::extract (Serializer &serializer, WheeledVehicleConstraintControl &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const WheeledVehicleConstraintControl::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, WheeledVehicleConstraintControl::Response &self) |
| CmdResult | mip::commands_filter::writeWheeledVehicleConstraintControl (C::mip_interface &device, uint8_t enable) |
| CmdResult | mip::commands_filter::readWheeledVehicleConstraintControl (C::mip_interface &device, uint8_t *enableOut) |
| CmdResult | mip::commands_filter::saveWheeledVehicleConstraintControl (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadWheeledVehicleConstraintControl (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultWheeledVehicleConstraintControl (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const VerticalGyroConstraintControl &self) |
| void | mip::commands_filter::extract (Serializer &serializer, VerticalGyroConstraintControl &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const VerticalGyroConstraintControl::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, VerticalGyroConstraintControl::Response &self) |
| CmdResult | mip::commands_filter::writeVerticalGyroConstraintControl (C::mip_interface &device, uint8_t enable) |
| CmdResult | mip::commands_filter::readVerticalGyroConstraintControl (C::mip_interface &device, uint8_t *enableOut) |
| CmdResult | mip::commands_filter::saveVerticalGyroConstraintControl (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadVerticalGyroConstraintControl (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultVerticalGyroConstraintControl (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const GnssAntennaCalControl &self) |
| void | mip::commands_filter::extract (Serializer &serializer, GnssAntennaCalControl &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const GnssAntennaCalControl::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, GnssAntennaCalControl::Response &self) |
| CmdResult | mip::commands_filter::writeGnssAntennaCalControl (C::mip_interface &device, uint8_t enable, float maxOffset) |
| CmdResult | mip::commands_filter::readGnssAntennaCalControl (C::mip_interface &device, uint8_t *enableOut, float *maxOffsetOut) |
| CmdResult | mip::commands_filter::saveGnssAntennaCalControl (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadGnssAntennaCalControl (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultGnssAntennaCalControl (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const MagneticDeclinationSource &self) |
| void | mip::commands_filter::extract (Serializer &serializer, MagneticDeclinationSource &self) |
| void | mip::commands_filter::insert (Serializer &serializer, const MagneticDeclinationSource::Response &self) |
| void | mip::commands_filter::extract (Serializer &serializer, MagneticDeclinationSource::Response &self) |
| CmdResult | mip::commands_filter::writeMagneticDeclinationSource (C::mip_interface &device, FilterMagDeclinationSource source, float declination) |
| CmdResult | mip::commands_filter::readMagneticDeclinationSource (C::mip_interface &device, FilterMagDeclinationSource *sourceOut, float *declinationOut) |
| CmdResult | mip::commands_filter::saveMagneticDeclinationSource (C::mip_interface &device) |
| CmdResult | mip::commands_filter::loadMagneticDeclinationSource (C::mip_interface &device) |
| CmdResult | mip::commands_filter::defaultMagneticDeclinationSource (C::mip_interface &device) |
| void | mip::commands_filter::insert (Serializer &serializer, const SetInitialHeading &self) |
| void | mip::commands_filter::extract (Serializer &serializer, SetInitialHeading &self) |
| CmdResult | mip::commands_filter::setInitialHeading (C::mip_interface &device, float heading) |