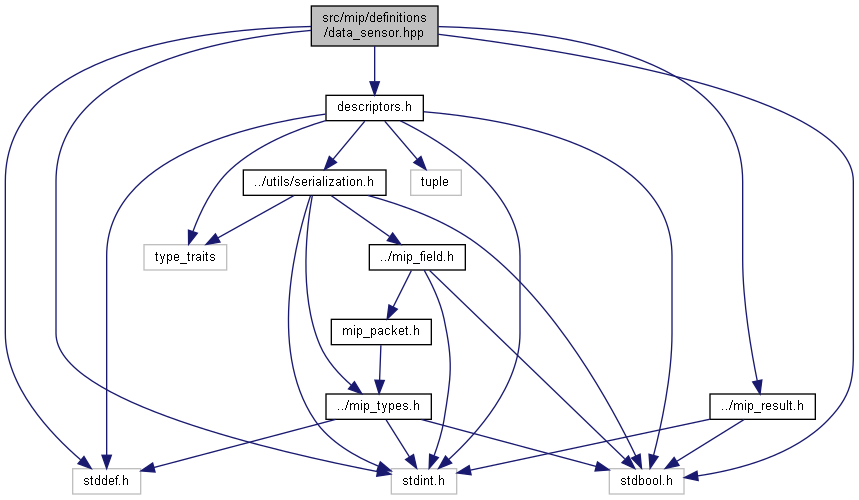
#include "descriptors.h"#include "../mip_result.h"#include <stdint.h>#include <stddef.h>#include <stdbool.h>
Include dependency graph for data_sensor.hpp:
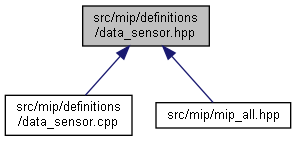
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mip::data_sensor::RawAccel |
| struct | mip::data_sensor::RawGyro |
| struct | mip::data_sensor::RawMag |
| struct | mip::data_sensor::RawPressure |
| struct | mip::data_sensor::ScaledAccel |
| struct | mip::data_sensor::ScaledGyro |
| struct | mip::data_sensor::ScaledMag |
| struct | mip::data_sensor::ScaledPressure |
| struct | mip::data_sensor::DeltaTheta |
| struct | mip::data_sensor::DeltaVelocity |
| struct | mip::data_sensor::CompOrientationMatrix |
| struct | mip::data_sensor::CompQuaternion |
| struct | mip::data_sensor::CompEulerAngles |
| struct | mip::data_sensor::CompOrientationUpdateMatrix |
| struct | mip::data_sensor::OrientationRawTemp |
| struct | mip::data_sensor::InternalTimestamp |
| struct | mip::data_sensor::PpsTimestamp |
| struct | mip::data_sensor::GpsTimestamp |
| struct | mip::data_sensor::GpsTimestamp::ValidFlags |
| struct | mip::data_sensor::TemperatureAbs |
| struct | mip::data_sensor::UpVector |
| struct | mip::data_sensor::NorthVector |
| struct | mip::data_sensor::OverrangeStatus |
| struct | mip::data_sensor::OverrangeStatus::Status |
| struct | mip::data_sensor::OdometerData |
Namespaces | |
| mip | |
| A collection of C++ classes and functions covering the full mip api. | |
| mip::C | |
| mip::data_sensor | |
Functions | |
| void | mip::data_sensor::insert (Serializer &serializer, const RawAccel &self) |
| void | mip::data_sensor::extract (Serializer &serializer, RawAccel &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const RawGyro &self) |
| void | mip::data_sensor::extract (Serializer &serializer, RawGyro &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const RawMag &self) |
| void | mip::data_sensor::extract (Serializer &serializer, RawMag &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const RawPressure &self) |
| void | mip::data_sensor::extract (Serializer &serializer, RawPressure &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const ScaledAccel &self) |
| void | mip::data_sensor::extract (Serializer &serializer, ScaledAccel &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const ScaledGyro &self) |
| void | mip::data_sensor::extract (Serializer &serializer, ScaledGyro &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const ScaledMag &self) |
| void | mip::data_sensor::extract (Serializer &serializer, ScaledMag &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const ScaledPressure &self) |
| void | mip::data_sensor::extract (Serializer &serializer, ScaledPressure &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const DeltaTheta &self) |
| void | mip::data_sensor::extract (Serializer &serializer, DeltaTheta &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const DeltaVelocity &self) |
| void | mip::data_sensor::extract (Serializer &serializer, DeltaVelocity &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const CompOrientationMatrix &self) |
| void | mip::data_sensor::extract (Serializer &serializer, CompOrientationMatrix &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const CompQuaternion &self) |
| void | mip::data_sensor::extract (Serializer &serializer, CompQuaternion &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const CompEulerAngles &self) |
| void | mip::data_sensor::extract (Serializer &serializer, CompEulerAngles &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const CompOrientationUpdateMatrix &self) |
| void | mip::data_sensor::extract (Serializer &serializer, CompOrientationUpdateMatrix &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const OrientationRawTemp &self) |
| void | mip::data_sensor::extract (Serializer &serializer, OrientationRawTemp &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const InternalTimestamp &self) |
| void | mip::data_sensor::extract (Serializer &serializer, InternalTimestamp &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const PpsTimestamp &self) |
| void | mip::data_sensor::extract (Serializer &serializer, PpsTimestamp &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const GpsTimestamp &self) |
| void | mip::data_sensor::extract (Serializer &serializer, GpsTimestamp &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const TemperatureAbs &self) |
| void | mip::data_sensor::extract (Serializer &serializer, TemperatureAbs &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const UpVector &self) |
| void | mip::data_sensor::extract (Serializer &serializer, UpVector &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const NorthVector &self) |
| void | mip::data_sensor::extract (Serializer &serializer, NorthVector &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const OverrangeStatus &self) |
| void | mip::data_sensor::extract (Serializer &serializer, OverrangeStatus &self) |
| void | mip::data_sensor::insert (Serializer &serializer, const OdometerData &self) |
| void | mip::data_sensor::extract (Serializer &serializer, OdometerData &self) |